EMPCCCC
This page last updated: December 21, 2012 as of July 2017
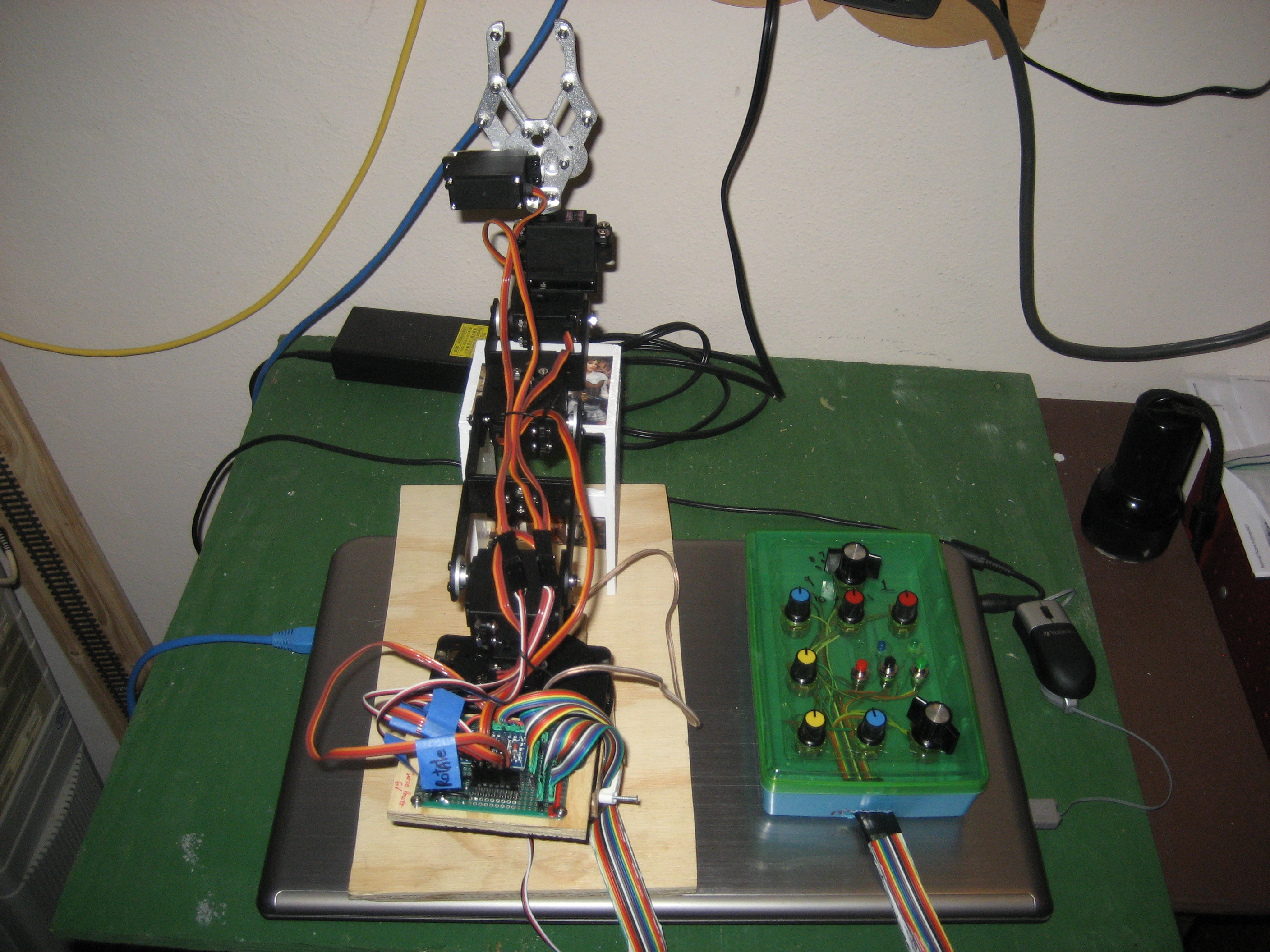
Wood chip plant : Mecha-crane-arm log crane Building instructions



Version 1, as of 2017, June 2017
- Mecha-crane-arm log crane Overview...
- ROBOT ARM discarded avenues of approach
- Parts from ebay except the crayola box and the Lynxmotion rotating base
- round metal servo horns...
- and sundry items...
- box to hold bits...
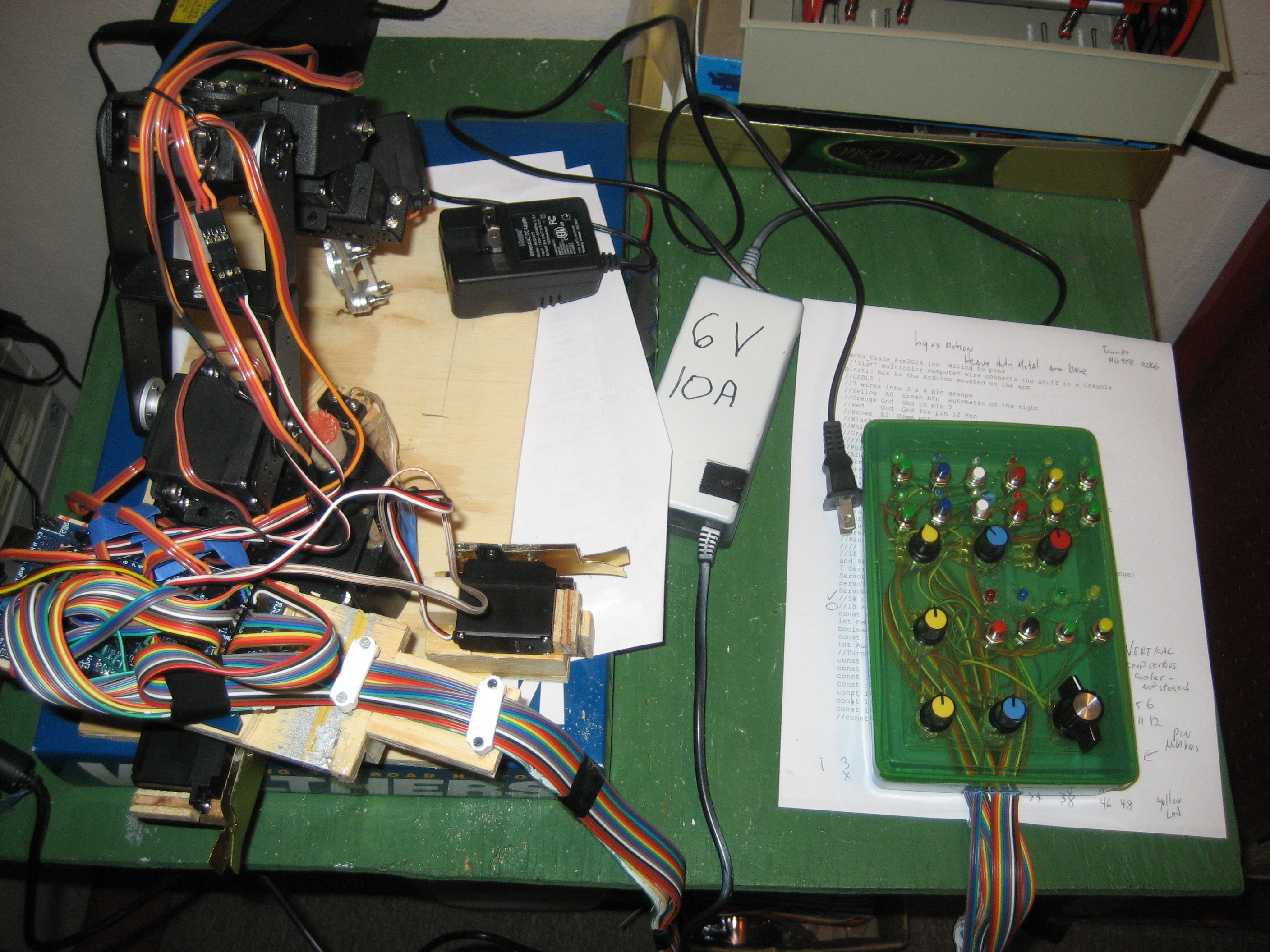
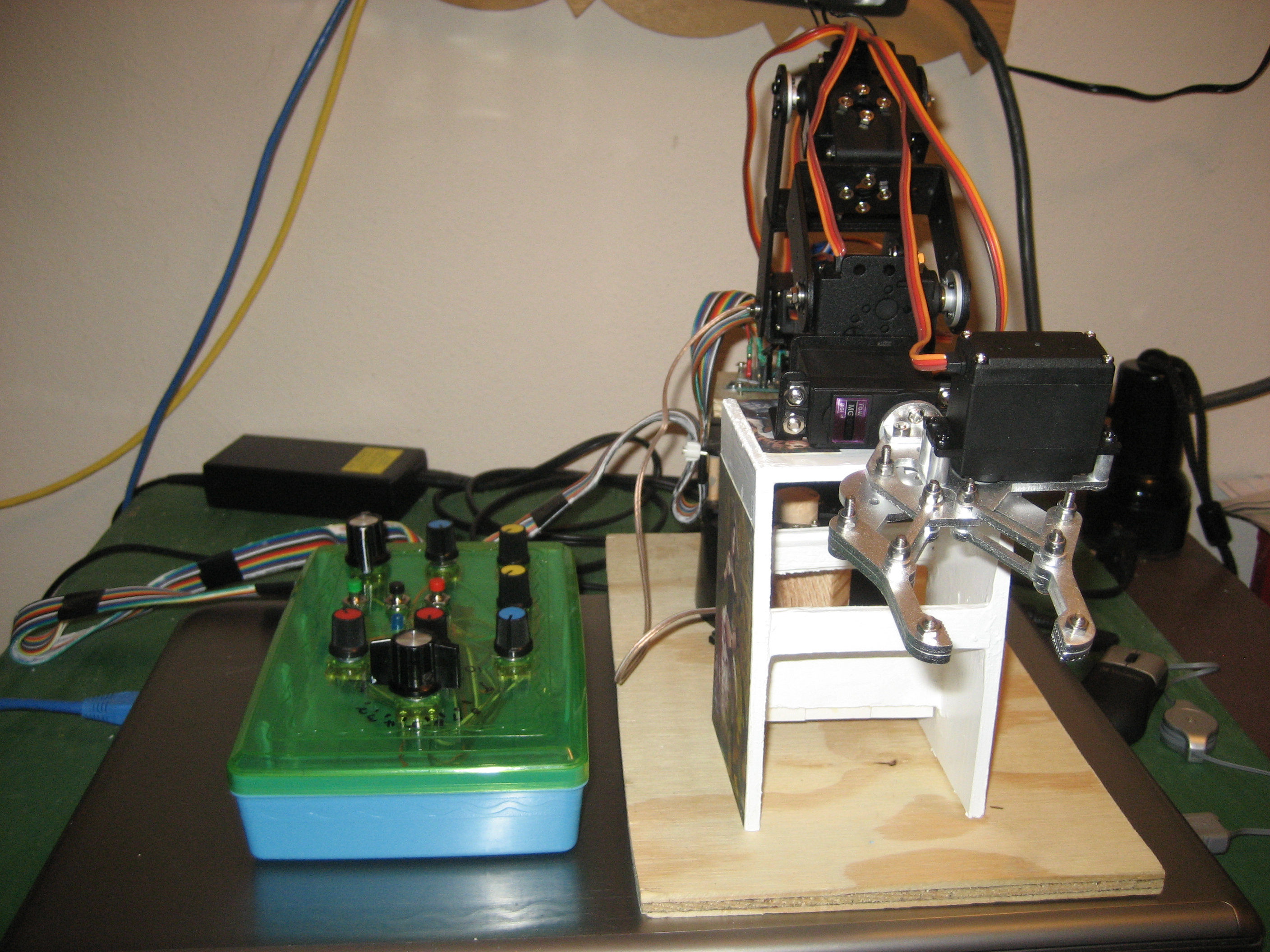
- 8 potentiometers, 3 buttons, 2 LEDs... That and 7 servos consume all the Arduno pins.
- wire : 5 Gnd (Reset, 2 Btns & 2 LED - yeah just for signals sake), 8 Analog pots, 3 Btns (Reset, Manual, Automatic), 2 LED (Manual, Automatic) : 16 wire bundle for +- for 8 potentiometers.
- pins, female pin sockets, proto board, 2 120 Ohm resistors, servo wires for the ones way out there...
- Redid using a Mega, deleted the control potentiometer and replaced it with 12 buttons and LEDs. and lots more wires. Added two servos at the base to hold the arm when turning - to keep it from turning when the arms moves.

- Arduino... 5V Pro mini -new- version that has 8 Analog pinouts.
- Analog : 8 potentiometers ... 7 for servo and 1 for multiple commands : 8 Analog
- Digital : 7 Servos (2..8), 2 LED (10, 11), 3 buttons (Reset pin,9,12): 11 Digital
- AAackkch... I need another pin for the full rotation stop positions... lucky 13 is all that is left. - do not want to mess with 0 or 1 Tx Rx pins. When it hits the stop positions the on-board LED turns on -


Bottom Top
- Leftoverture...
- Meanwhile things got Hillaried and all this has to be redone... will use a Megas rather than the mini to give more pushbuttons and sensors....
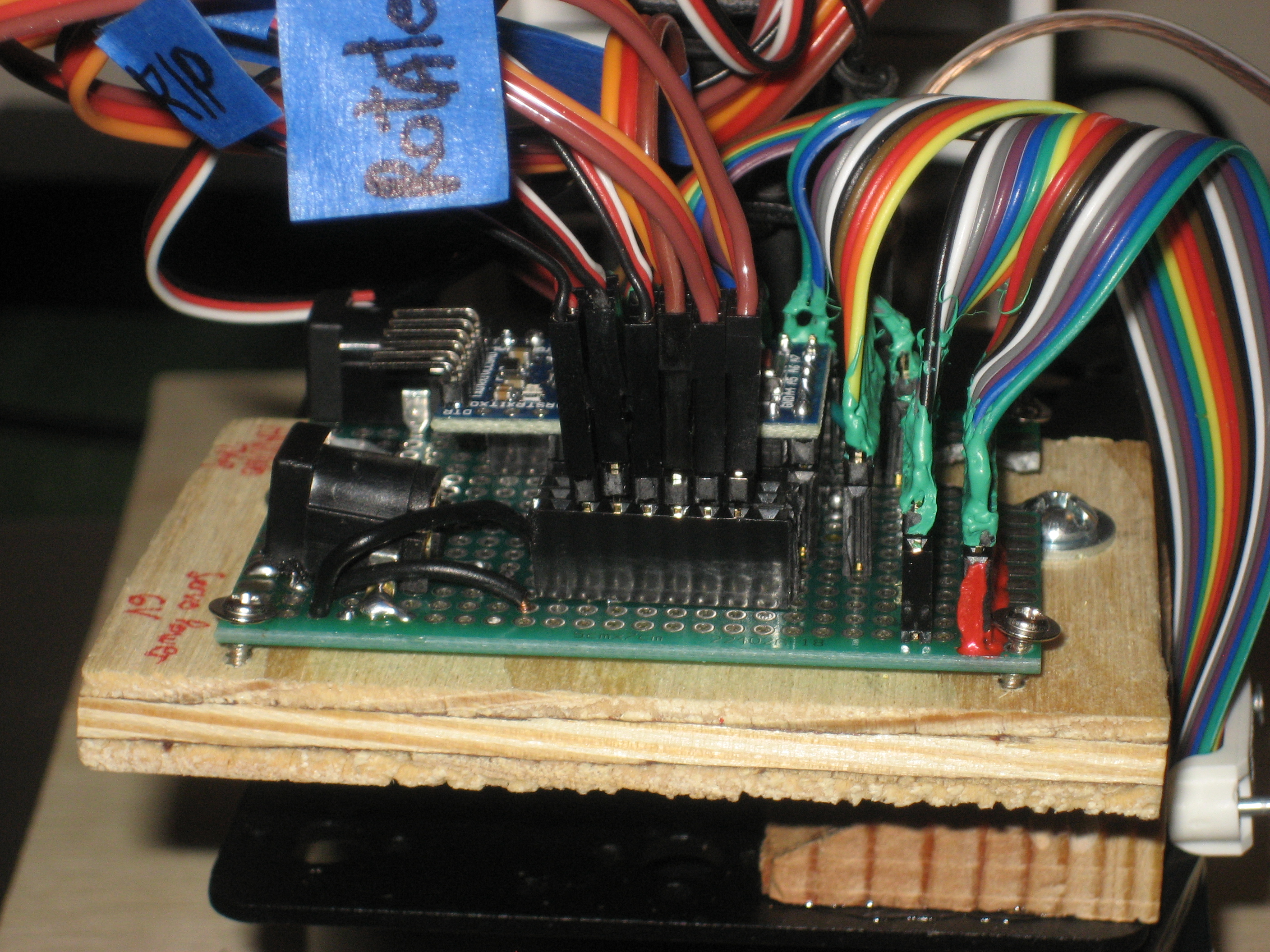
- Tried to use an Ada Servo board clone - but it got Hillaried... so I went back to using servo connections on the board - thus the scrambled wiring.
- And that had to be redone as some of the pins got Hillaried...
- and then i added some base holding servos...
- The green globs on the wires were insulation as the wires were soldered onto pins - they have been converted into press on connections similar to normal servo connections - the soldered wires kept breaking when handled - even carefully.
- Building...
- Arm
- I used a full rotation servo and a Lynxmotion round base PLUS the arms rotation... so it can go 180 degrees plus +-45 from there. Makes mounting the arm much more difficult than designed. Once the base was drilled for the arm base it was assemble per the photos.
- MG 996R servos... dunno if any stronger are available that would fit in the arm metal.
- Really needs a stronger servo to lift the arm at first joint......
- A Lynxmotion Heavy Duty Metal Arm Base with Hitec servo will replace the kits rotation servo metal at the base - as it burnt out and wobbles. Towerpro MG958 servos will be used for the
two one vertical lift servos - 996R servos get too hot too quick, so these more powerful servos should perform better. 996 claim to be 14kg servo and the 958 claim to be 20kg.
- Redid the wood base it all sits on and the wood platform the Arduino sits on. The control wires and the power wires caused too much friction during turning, so things were rearranged and only the servo wires are pulled around by the arm. Huh, original thought was to reduce turning force requirement by having the Arduino on the arm so it did not have to pull the wires around... and then the control wires got thicker and thicker.
- After the 2017 6 21 Video : Extended the forearm, and added a servo mounted so the hand can turn to tilt the logs into the chipper. This of course required more wires, another pot stuck in amongst all the other things on the control board and rewiring the main Arduino board.
- Moved the Arduino board to the back right so the wires can exit down under the layout and the control box and wires will be out of the way for the log trains to enter.
- Box

- 'flat' multicolor computer wire... glued together with caulk- claimed to be flexible- not so much and remaining glued together - now just a stiff mess.
- potentiometers and buttons and LEDs... 6 new ones and 2 older potentiometers. One old one for the base full rotate and the other marked for 10 positions.
- The top potentiometer was to be used to set which of 10 automatic movements was to be done. It has been removed and there will be
8 12 buttons and LEDs to select the auto movement. And thus another load of wires going to and fro.
- The new box can be seen at the top of the page...
- Resting stand

- Glommed together from thin plywood
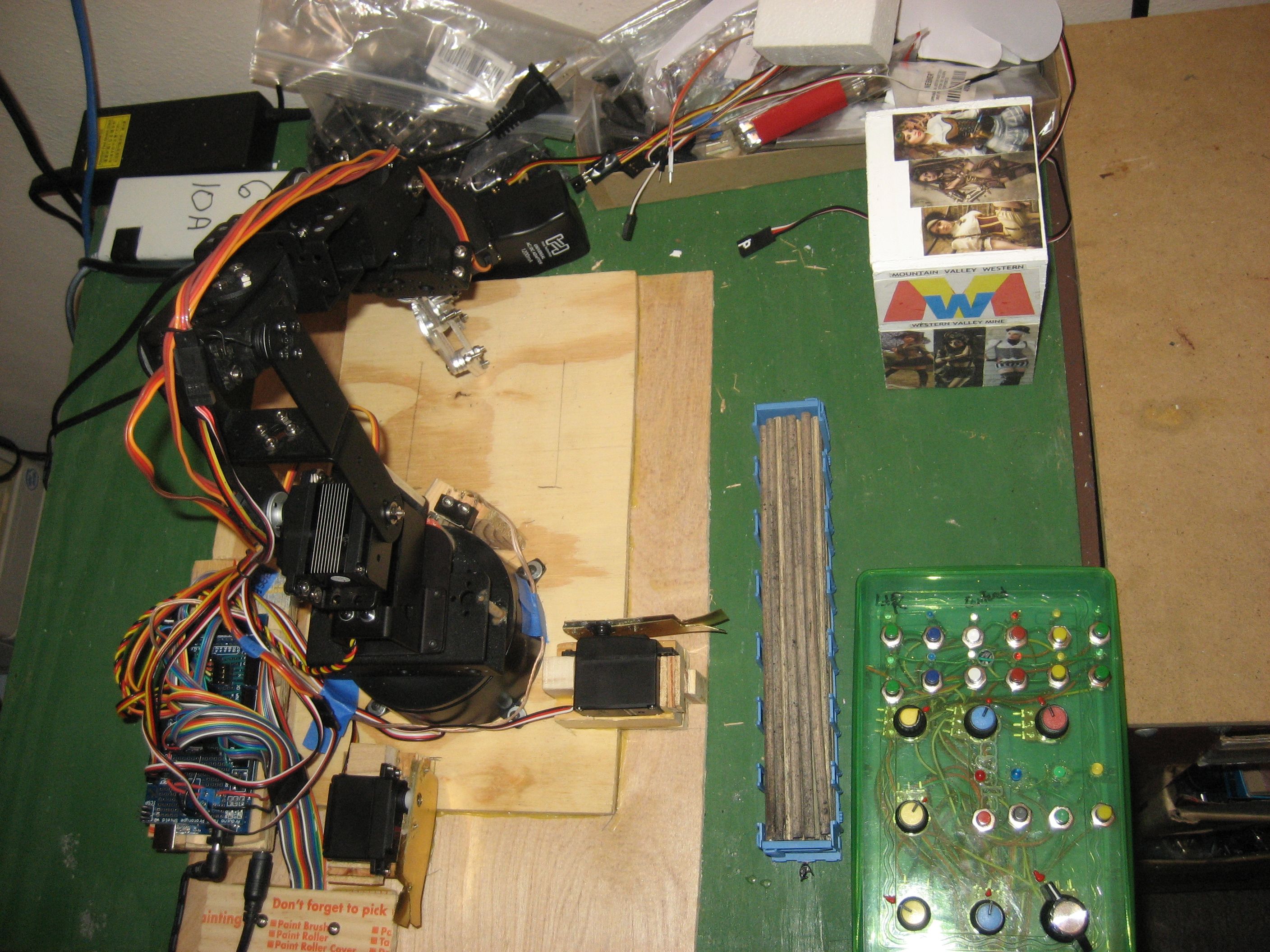
- Steampunk cosplayer images decorate most of it...
- still working on the servo positions for the 'Final Resting Place" either need a servo stronger than MG996R or some different kind of positioning... maybe hunched over like in photo above rather than flat out forward like the overview photo.
Giving it Moar Powr with a 3 amp supply solves some problems. Meanwhile things got Hillaried and all this has to be redone... will use a Mega rather than the mini to give more pushbuttons and sensors. Currently use a 6 volt 3 amp supply - will order a 5 amp supply to see if it helps in the initial O what a load the servos give. As of 2017Mar13 it has a 6Volt 10Amp power supply.
- As of 2017 June the stand is not used much anymore... During initial startup the arm twists and turns like a demon.
- Programming...
- Idea is to have manual control OR computer coded movements per button selection.
Computer selection will be from a potentiometer coded to interpret the resistance changes as individual selections. Computer selection will be from 8 12 buttons used to select the command. Manual will really be to get the servo position values for the computer movement and to play with it. This is not a feedback - move the arm to program its movements machine.
- Program bashed from other programs... the Arduino strength.
- Videos
- Mecha-crane-arm log crane of the wood-chip-mill 2017 7 17. Video of it unloading on YouTube
- Mecha-crane-arm log crane of the wood-chip-mill. Video of it unloading on YouTube
- Mecha-crane-arm log crane of the wood-chip-mill version 2. Video on YouTube
ROBOT ARM discarded avenues of approach : OWI would take more work to mount pots and still not be this good AFAIK, Lynxmotion is expensive compared to ebay from China .. China just sends a bag of parts - you figure out what to do with it.
owirobots robotic-arm is 9" x 6 1/4" x 15" in size and requires four D batteries that are not included. $30 .. 120 depending on which (larger version) and what (computer controlled too)... less expensive than the source :) owirobots
$50 at Adafruit 2013
Specifications:
* Wrist motion of 120 degrees
* An extensive elbow range of 300 degrees
* Base rotation of 270 degrees
* Base motion of 180 degrees
* Vertical reach of 15 inches
* Horizontal reach of 12.6 inches
* Lifting capacity of 100g.
# Max Length Outwards = 360 mm (14.2 in)
# Max Height Upwards = 510 mm (20.1 in)
# Max Lifting Capability = 130g (4.6 oz.)
Lynxmotion robotic-arm
AL5D Robotic Arm Combo Kit for Serial Port
# 10.25" median reach; 13oz lift capacity.
# All-aluminum construction, SES-compatible.
Model Number: AL5DCN-KT Price: $352.68
Model Number: AL5D-NE Price: $282.83 (NO controller)
Star Wars VII :
The old emperor is the new emperor - just scarred a bit from the fall.
Hans son plan is to throw the emperor into an energy well - like his grandpa did.
Rey is Lukes daughter...

 Copyright © 1991..2017 by Ivan Lee Herring
Copyright © 1991..2017 by Ivan Lee Herring